Proyecto KUKA
- Introducción
- Descripción del proceso
- Elementos utilizados
Este robot es reconocido por su flexibilidad y diversas aplicaciones en la categoría de carga media.



- Prensa Wengarten VK 600 3960

- 2 Cintas Roller-Conveyor
Para el transporte de piezas.


- Herramienta de pintura ECCO70

- Herramienta de tipo ventosas
Para el transporte de piezas tanto en prensa como en paletizado.

- 3 KR C4 con programadora
Para el control de los robots.

- Sistemas de seguridad
- Autómata Siemens S7-1200
Atenderá el comportamiento de las entradas y salidas del proceso, deteniéndolo ante cualquier anomalía.

- Vallas de seguridad
Rodean todo el recinto, creando también uno específico para el apartado de pintura. Estas vallas impiden el acceso del operario al recinto, siendo imposible acceder salvo que sea a través de las puertas de seguridad.


- Puertas de seguridad
Equipadas con cierre de seguridad que detiene el proceso al abrirse.


Información y control a tiempo real del proceso del robot.
- Funcionamiento de la célula robotizada
La pieza es introducida a través de la cinta 1. Al llegar a su extremo la recoge el robot 1, el cual la lleva a la prensa para efectuar el prensado. Una vez prensada la pieza, el mismo robot la deposita en la cinta 2. La pieza avanza sobre la cinta hasta llegar a su posición intermedia, donde se detiene y el robot 2 efectúa la pintura. Una vez terminada la pintura la pieza sigue avanzando sobre la cinta 2 hasta llegar al final de la misma, donde el robot 3 la recoge y paletiza.
El proceso se ejecuta con 5 piezas, de tal forma que los 3 robots pueden ejecutar su proceso de forma simultanea en la cadena. Las cinco piezas se paletizan en forma de pirámide.
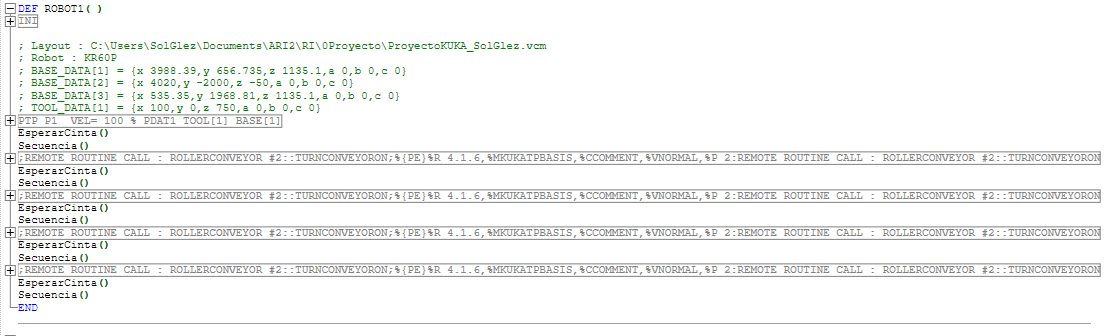
- Programación de la célula robotizada
- Robot 1:

- Robot 2:

- Robot 3:


No hay comentarios:
Publicar un comentario